浙大科研团队,无人机集群领域实现重大突破
作者 | 陈晨
编辑 | 郑玄
十架无人机在密集的竹林里穿梭。
如同组织有序的蜂群,无人机群有条不紊,越过崎岖起伏的地面、穿过倾倒交错的竹子间狭窄的空隙,伴随着「嗡嗡」声,它们轨迹平滑地从一个间隙连接到另一个间隙,一个个蓝色的身影穿过碧绿的竹林,最终整齐地悬停在竹林外。
它们不是《安德的游戏》中抵御外星人攻击的无人机舰队,也不是《银翼杀手 2049》里在摩天大楼间参与空中交通的一员,它们没有武器,也还没有领到搜救或运输的任务,但是却出现在现实世界中,就在湖州安吉的一片竹林里。

十架无人机穿越竹林
5 月 5 日这天,浙江大学的周鑫等人于《科学·机器人》期刊发表最新研究成果,经过两年多的研究,科研团队解决了未知复杂环境下,机器人单机与群体的智能导航与快速避障方法等一系列核心技术难题,成功研发出自主导航的集群飞行系统。
这无疑是项「卓越」的成就。瑞士洛桑联邦理工学院智能系统实验室的 Enrica Soria 在《科学机器人》杂志上评论这项研究时说:「这项工作为机器人领域作出了重大贡献,也朝着无人机群在实验室有限环境之外的应用方面迈出了重要一步。这样一来,无人机群不仅能在森林中探索,也能在人造环境、如由人类和建筑物组成的城市区域执行一系列重要任务。」
在通向想象中那个「未来」的路上,人类的脚步又加快了一点。
01、 从单体智能向群体智能
智能是无人机起飞的「基石」,而从单体智能向群体智能发展,则是近年来的大趋势。
宾西法尼亚大学的实验室里,Vijay Kumar 和他的团队受到蜜蜂的启发,在机器人上搭载机载传感器、摄像头和激光扫描仪,借以扫描分析环境中的特征信息,形成地图,让机器人以无碰撞的方式实现导航。
到了 2017、2018 年,无人机自主导航实现了从室内到室外的跃迁。从农场到树林,无人机完成了对目标的追踪、搜索,及自主航线规划。
这些年里,单体无人机自主导航在工业和学术实践中得到了快速的发展,但截至目前,空中集群系统的「智能化」还处于初级阶段。能够支持大规模成熟应用的无人机空中集群,如无人机灯光秀,仍然是在全球导航卫星系统定位下,遵循预先编程的轨迹完成表演。

无人机编队表演
无人机领域的「智能集群」其实基于生物集群行为。
1959 年法国生物学家 PierrePaul Grasse 发现昆虫之间存在高度结构化组织,能够完成远远超出个体能力的复杂任务。一些智能集群算法也在后续对昆虫间智能集群行为的探索中逐渐涌现出来,比如 20 世纪 90 年由意大利学者 Dorigo、Maniezzo 等人提出,应用于组合优化问题的蚁群算法。
据周鑫等人在文章中介绍,无人机领域现在有两种主流的导航方法: 一种模仿昆虫,一种模仿鸟类。
「昆虫」长于短时反应,在计算和内存占用上更为高效,能够让无人机更为轻巧;「鸟类」鸟类更喜欢相对长期的平稳动作,更可能得出最佳路径也更为灵活。
现有的一些无人机智能集群方案大都使用了这两种方法,比如一些研究者尝试使用简单的反应规则,让飞行机器人根据其他机器状态实时调整其运动。这种方式的弊端也很明显——缺乏对最佳性的考虑,容易导致飞行器行动不连贯,需要更大的安全距离。有些实现了对鸟类行为的模拟,但操作各个个体又显得尤为困难。
更多的优化方案不断地被提出,如 McGuire 等人提出了一种反应性群体梯度错误算法,使用光流定位和激光测距传感器进行障碍物检测,并将所有传感、决策、控制的功能部件集成到 30g 之内。周鑫他们团队也曾提出了 EGO-Swarm,一种部署在森林中的空中集群全栈导航解决方案。
摆在这些研究者面前的问题都是相同的: 如何在各种规划路径中得到最优解?如何提高方案的可扩展性,兼容更多任务及目标?如何实现更「经济」的计算,为其他任务保留尽可能多的可用资源?如何实现更小的体积与重量,以提高飞行时间、适用复杂及狭窄的地形?
困扰他们的还不仅仅是单个问题的解决,这四个目标往往就是互相矛盾的,比如最优解依赖复杂的建模与不同方案的迭代试验,而这样会增加计算成本;提高可拓展性意味着以更通用的方式来定义问题,而这又牺牲了对潜在特殊问题的优化,可能与最优解失之交臂。在这种情况下,如何实现全局的优化显得尤为困难。
在研究了各种方案后,周鑫等人将轨迹规划定义为重点问题,因为「它不仅改变轨迹的形状(是否平滑),而且能调整时间曲线,以充分利用可解的方案,最大化无人机的能力。」
在昆虫与鸟中,他们选择了后者,他们将鸟类这种长于轨迹规划的能力,归因于鸟类相比于昆虫更敏锐的视觉和运动感,更高自由度的运动系统,和更多的大脑容量。
02、 向鸟类学习, 造多个「智慧大脑」
「巧合却又合理的是,我们提出的解决系统十分类似于鸟:能够在能够在森林中自由飞行,同时避开障碍物和其他移动的生物。」
他们团队也为无人机造了一个「智慧大脑」,尽管处理器只有拇指大小,却能独立计算处理飞行过程中的海量信息。
鸟类为了避免碰撞,会同时调整路径和速度,这种时空轨迹联合优化的方法,也被他们用在了智能集群的解决方案里,它的优势也在他们的实地实验中得以展现。
在无人机穿越竹林的实验中,无人机时常需要穿过狭窄的间隙,而在左右也有无人机的情况下,一般方法是调整机体的高度避免碰撞。调整高度除了会浪费资源外,还会遇到下冲干扰,而他们方案是:调整时间配置文件,允许多架无人机仅改变必要的速度,然后依次通过间隙。
这种时空轨迹联合优化的难点在于:空间和时间参数共同确认轨迹,但二者是高度耦合的,这也导致需要大量的时间来计算,才能确认最优轨迹。他们给出的解决方法是将目标函数计算中的时空参数解耦,实现优化变量与表示轨迹的中间变量之间的线性复杂度映射,从而实现实时时空优化。
在这套轨迹规划的框架下,他们还将所有目标和约束条件转换为加权惩罚,通过「加权」的方式实现对不同目标及约束条件重要性的排序,用户可以预先添加特定于任务的目标及约束条件。
他们将这套方案与两个已知的最为先进的规划方案进行了基准比较,一个是 MADER,一个是他们自己之前提出的方案 EGO-Swarm。
在测试场景中,无人机需要以 2 m / s 的速度飞越狭窄的大门和分布众多障碍物的区域。MADER 和 EGO-Swarm 都因为避免碰撞,出现了无人机等待或绕道的情况,而他们现有的方案却通过调整不同无人机的时间轨道,在避免碰撞的前提下,让无人机以最为平滑的方式通过,这种机体的较小变动则进一步保证了安全。

三种方案中,无人机通过窄门及障碍物区域的轨迹图
鸟群编队前行的方式同样给了他们灵感。
他们其中的一个实验是野外编队导航,要求十架无人机保持方形编队在树林中飞行。鸟类提供了一个「非常识」的经验,即编队飞行中,不能有预先设定的形状。
从他们的实验中可以看到,编队通过矮丛和障碍物时并不总是保持规整的方形,有时无人机必须偏离前面的障碍物,然后再加快速度赶上编队。
正在测试中的无人机群
而且当无人机避开树木时,平均速度会自动下降,当它们完全回到开阔空间时,平均速度会增加。一些个体的速度变化在没有预编程的情况下,传播到了整个编队。
他们还在每架无人机上独立运行着视觉惯性里程计测距(Visual Inertial Odometry),以进行空中群体定位,并开发了一种分散的漂移校正算法以最小化误差,以避免碰撞。与之对应,鸟类在短程导航中主要依靠眼睛及前庭系统。
单体与群体智能的协调还体现在很多方面,比如每架无人机都配备了完整的感知、定位、规划和控制功能,并通过一个高保真无线通信的广播网络共享轨迹,高速计算用于快速规划,以此实现松散耦合,提高整体运行的稳定性。
03、 一个「游乐场」, 一方「试验田」
周鑫他们团队在四种场景中完成了测试,除了上述介绍的飞越茂密竹林、野外编队导航之外,还有高密度场景下的相互回避测试,在目标遮挡场景下的多无人机跟踪。
在相互回避测试中,10 架无人机进入到一个 3 米的圆圈范围内。在抵达目标后,无人机会被随机分配圆圈内的其他目标,如此往复。
实验过程中,除了原先的树木和三脚架外,实验人员会模拟真实场景,逐渐放置各种障碍物模拟新建筑,自己也会作为障碍物穿行于该区域,人为干扰和移动场上正在飞行的无人机。除此之外,还关闭了所有的地面定位锚点,以此模仿全局定位的损失。
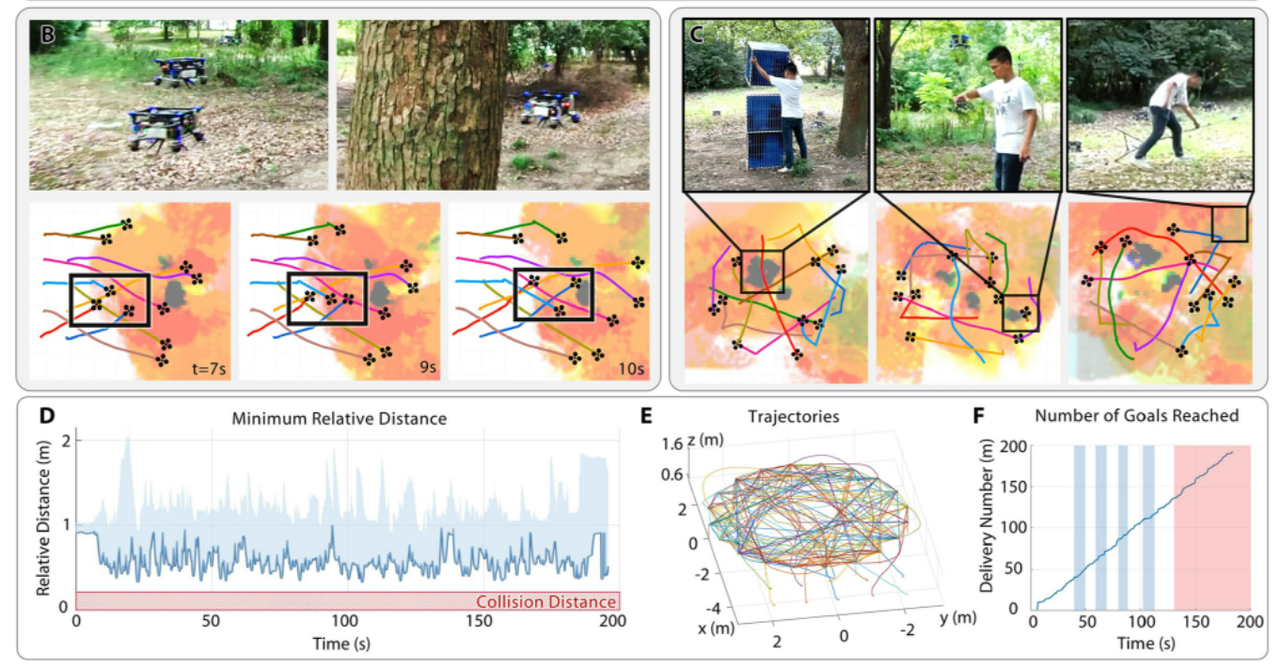
高密度场景下的相互回避测试
实验的结果是可喜的。无人机达到的总目标的数量随着时间的流逝而线性增加,他们将这归功于轨迹规划达到的局部最优解。「在不同障碍物密度下实现了近乎恒定的传输速率。」
载人低空交通还未至,但无人机物流配送却不远。 国内外,美团、顺丰、亚马逊、谷歌等一众参与者都加入了无人机物流的行列,城市则是越来越重要的物流配送场景。
无人机在狭小空间里方向随机地飞行,并躲避障碍物及其他无人机,这一设置还原了摩天大楼林立的城市空间里,空中交通密集繁荣的场景。这项测试的结果,则给了无人机系统能否实现「安全」、「高效」、「单独导航」三项基本要求这个问题,一个积极、正面的答案。
飞跃竹林任务同样如此。无人机群能在杂乱的野外实现自主导航,人造环境中的导航能力也得到了侧面的印证。而且,在更多复杂的场景中,如灾难现场,也可能因为无人机的进入提高难时搜救能力。
在另一项多无人机跟踪测试中,人类参与者在树林中移动,四架无人机从前后左右四个方向对人类参与者进行追踪。
无人机除了避开障碍物并赶上人类参与者外,还配备了额外的 RGB 摄像头。这个摄像头的重要任务当然不仅仅是拍摄视频,它更是作为具有代表性的「高数据负载」硬件,完成视频压缩、数据存储、对象检测的任务,来验证平台在高计算成本任务下的可扩展性。
这也意味着,更多的软件和功能也可以被添加到无人机群上。
周鑫团队最后做了一件事,他们将系统内所有的代码都公开在了文章的补充材料里。他们也发布了加速空中集群研究所需的软件和硬件,其他开发人员可以部署这些软件和硬件,并在模拟和现场环境中验证他们的算法。
这些被分享的数据资料被命名为「swarm 游乐场」。游乐场里,更多更富挑战性的任务正在被模拟验证着。
参考文章:
https://www.science.org/doi/10.1126/scirobotics.abm5954
*头图来源:视觉中国
本文为极客公园原创文章,转载请联系极客君微信 geekparkGO






