机器人力/力矩反馈控制,海伯森六维力传感器实现多场景落地
上世纪70年代,我国的机器人技术进程开始起步,机器人在各行业的应用越来越广,从简单的替代低精度的重复劳动,到通过高精度传感器获得感官功能,未来向着人工智能方向发展。
机器人技术及应用发展可分为三个阶段四大层次,三个阶段发展的关键因素分别是人口红利因素、工程师红利优势和人工智能技术优势等。中国凭借强大的人口优势快速地度过了自动化阶段,国内已经有众多工业机器人龙头企业;目前我国和日本、韩国等领先国家一样处于机器智能向人工智能过渡阶段;在人工智能技术积累方面我国也处于世界前列。

机器人技术及应用发展得三个阶段四大层次
资料来源:前瞻产业研究院整理
六维力觉感知拓宽应用边界
在目前的工业界,几乎都在使用传统的位置控制,例如让机械臂沿着事先规划好的轨迹在封闭、确认的空间中运动。或者从视觉系统(Vision System)的反馈,使得位置控制的机器人具备一定适应外界可变环境的能力。从自动化到机器智能、人工智能的迈进,要借助于高精度的传感器。灵敏的视觉系统是机器人的眼睛,除了帮助机器人更好的工作,还能保障工作安全。但随着机器人应用边界的不断拓宽,单单靠视觉赋能已经满足不了复杂的实际应用,此时就必须引入力/力矩控制输出量,或者将力/力矩作为闭环反馈量引入控制。由于机械臂和工作面的接触常常是未知的复杂曲面,因而这种力/力矩的感知,必须是多维的。我们说的六维力传感器,是指测量空间X、Y、Z三个方向上的力和扭矩的传感器。
六维力传感器(6-Dimension Force Torque Sensor)是力传感器中一种新发展起来的传感器,能同时转换多维力/力矩信号为电信号,可用于监测方向和大小不断变化的力与力矩和测量加速度或惯性力以及检测接触力的大小和作用点。
六维力传感器可以赋予机器人力与扭矩的感知变化,在完成简单机械重复运动的基础上去做更复杂的工作,如精密装配(Precision Assembly)、力控柔性抓取(Force Controlled Flexible Pick & Place)、抛光打磨(Polishing)、插拔拼装(Insertion & Assembly)等,其工作质量直接取决于机器人对力的感知与控制精度和速度。为什么要一直提力控?力控为什么这么重要?行业内有一种共识,未来的机器人运动控制领域,必须引入力控(Force Control),纯位置控制(Position Control)是没有前途的。
作为一家专注于研发高端智能传感器的 科技 公司,海伯森HYPERSEN凭借在工业力学、光学领域的多年经验,自主研发生产了光谱共焦位移传感器、超高速工业相机、六维力传感器、激光对针传感器等多种高端智能传感器,产品获得了多项国家专利并通过了CE \ FCC \ RoHS \ IEC62471 \ IEC60825等国际认证。其中,HPS-FT系列六维力传感器作为海伯森的经典产品,提供了更优越的机器人力控解决方案,并且在六维力控中赋予了更高的性能和可操作性。

衡量六维力传感器性能的主要指标有,量程、精度、抗过载能力、数据输出频率、非线性度、蠕变、迟滞、零漂、温漂、轴间串扰,此外还有解耦算法、滤波算法、温度补偿算法等等。六维力传感器作为赋予机器触觉的传感器,在机器人和机电一体化设备中具有广泛的应用。六维力传感器的力控精度、量程、以及在各类环境下的抗干扰能力都是影响客户体验感的因素。要做好这些,对产品提供方的软硬件研发能力提出了很高的要求。
在硬件方面,海伯森自研的HPS-FT系列六维力传感器采用了高精度应变计和紧凑型结构设计,实现了更高的信噪比和灵敏度,IP67防尘防水,在多数恶劣工业环境下也能实现数据精确采集;在软件方面,六维力传感器内置的温度补偿算法大大降低了由于温度变化导致的温度漂移,高精度解耦、滤波算法等实现了六维力传感器的低零漂、低温漂、低轴间串扰的良好性能。
六维力控多场景落地
随着机器人在工业和生活中的应用场景愈加广泛,在机器人行业中基本达成共识:未来的机器人运动控制领域,必须引入力控,纯位置控制是没有前途的。未来,对机器人的要求是走进人类的生活,不仅需要机器人安全地与人类做物理上的交互,还要求做到柔顺的阻抗控制,具备在未知环境中的运动的能力和快速的动态控制调整能力,以上的所有,都离不开——力/力矩控制。
力控传感器一般安装于机器人“四肢”,六维力传感器通过法兰与机械臂的末端关节固定连接,机器手臂末端的六维力传感器测得X、Y、Z方向的力和力矩数据,并通过电缆传输给机器人从而实现六维力控。在工业自动化中,海伯森HPS-FT系列六维力传感器高达2000Hz的输出频率可使机器人实时感知并控制力和力矩的大小,力控精度达0.05N(Fxy、Fz方向),0.001Nm(Mxy、Mz方向)。通过六维力传感器,可实现力控抛光打磨、细小工件精密装配、软包柔性抓取、USB柔性插拔、拧螺栓等工作。

除了力与力矩的控制方面,海伯森HPS-FT系列六维力传感器的EtherCAT /Ethernet适配器的IO可与机器人的急停IO相连接,并设置报警阈值。当阈值超出,适配器通过IO信号对机器人发布急停命令,使其暂停。六维力传感器超敏感的压力传导系统,具有良好的防碰撞急停功能,可有效保护用户人身安全,防止设备的损坏。
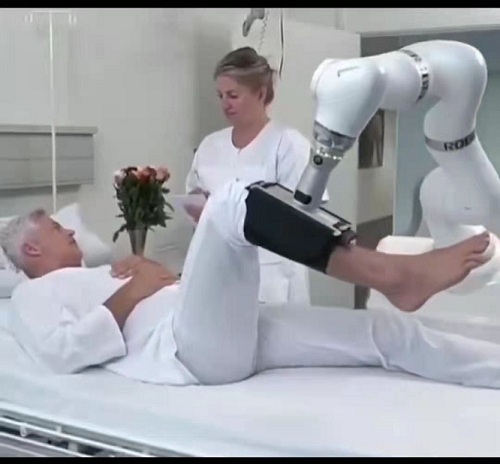
搭载了六维力传感器的机器人也能基于模糊自适应导纳控制,准确控制机器人末端接触力。通过拖动示教,记录路径和力度并做重复性工作,是机器人最常被安排的工作。在医疗康复行业,为病人活动受伤的部位,颈椎正骨牵引康复等工作越来越多的交给机器人。
为适应不同场景工作要求,海伯森HPS-FT系列六维力传感器研发了多种不同的型号,传感器HPS-FT120最大量程达5000N、150Nm,传感器HPS-FT025最小可达150N、4Nm,最高可达500%的静态抗过载能力,覆盖了大部分应用的负载范围。此外,还设置了不锈钢材质的HPS-FT060S,它具有更强的刚性,可适应更高强度工作和更复杂的工作环境。

人类通过各种感官确认物体的形状和位置,未来,机器人或许也能像人类一样,通过眼睛锁定,耳朵听见,皮肤触摸,鼻子嗅闻来准确锁定物体位置、形状及状态。海伯森,致力于建立一流的高端智能传感器品牌,坚持“技术赢市场,诚信待客户”的原则,推动国产传感器科技赋能“中国制造”向“中国智造”的转变,助力工业机器人更加智能化、柔性化,协助机器人走向“人机共融”。