思岚科技发布最新SLAM定位建图解决方案—— SLAMKit
为了进一步解决客户在使用SLAM过程中遇到的 大场景建图难,建图细节不平整有毛刺、动态环境定位难 等问题,思岚 科技 创新了自主定位建图产品形态,迭代了SLAM技术,发布了最新一代高可靠性定位和建图解决方案SLAMKit。

SLAMKit是业内首个独立提供定位与建图功能的 商业 化解决方案,以领先业界的扩展性和稳定性赋能移动机器人产业链。 可以通过软件授权的方式嵌入运行在机器人的主控器中,并为机器人提供环境建模与自主定位的能力 ,客户可以通过高度标准化的软件接口快速构建出个性化的机器人应用程序。
SLAMKit的 产品形态由三部分组成,包括传感器(思岚RPLidar S1,S2,S3和LPX T1激光雷达)、定位协处理模块和授权软件程序 。

其中,SLAMKit 必须搭载思岚的单线激光雷达产品使用。定位协处理模块是一块超小体积的授权控制板,为授权软件程序提供授权信息。软件授权产品在软件更新方面支持本地网页软件升级和远程OTA软件升级两种方式。
经过了4年的技术迭代和优化,最新发布的SLAMKit,定位性能更加优异,建图的鲁棒性也更强!
一、 赋予每一台应用拥有定位和建图的能力
SLAMKit的发布,让每一台应用都能轻松拥有卓越的 定位和建图 能力。面对高变、复杂、环境特征不足的大场景定位建图不再慌。
1、 定位
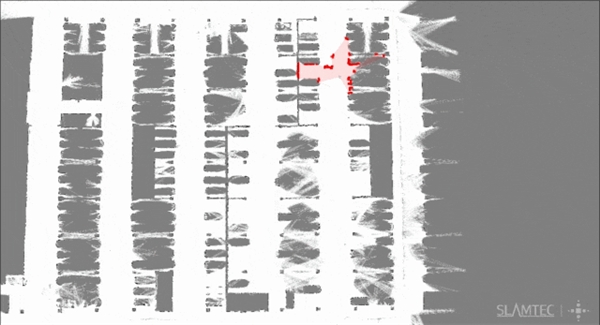
· 支持 复杂动态场景 的鲁棒性定位

· 支持 高变环境 的鲁棒性定位

· 接入多源融合定位框架
· 引入多重 辅助定位 技术
· SLAMKit功耗降低至业内同类50%
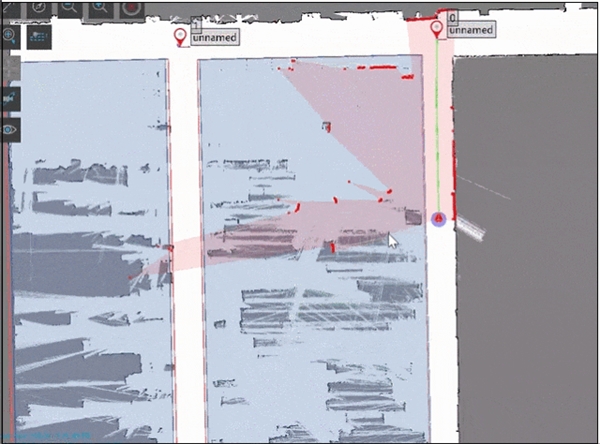
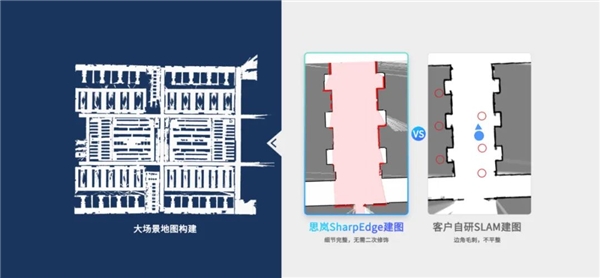
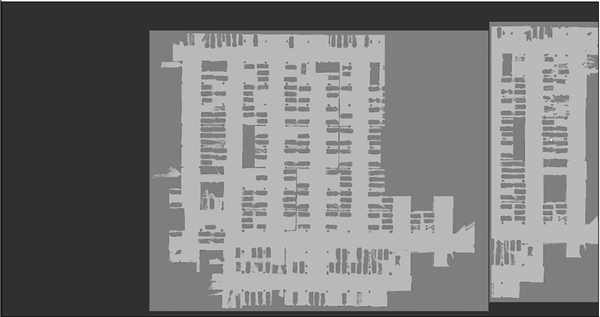
2、 在线地图构建
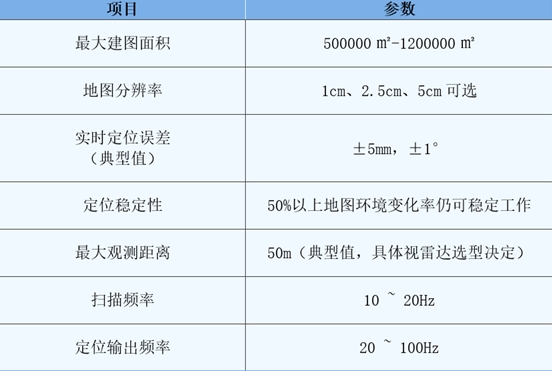
· 支持 50万㎡-120万㎡ 大场景 鲁棒性 建图

· 采用SharpEdge™地图优化技术,无需二次优化修饰。
· 拥有自主式和辅助式 闭环 检测与调整策略
· 提供建图参数调整的接口
二、 集开发、部署、运维于一体 , 提供贯穿产品全生命周期的多样化服务
与SLAMTEC Mapper相比,SLAMKit新增了“ 服务工程 ”的概念,用户可以基于思岚提供的SLAMKit产品进行开发、部署和运维。在获得思岚SLAMKit产品的软件授权使用之后,用户可获得:
1、 开发
C++|ROS|RESTFUL | RoboStudio
· 针对家用、清洁、工业、配送和巡检等多种类型场景下的SLAM问题进行了适配;
· 与常用主控硬件与系统的完美支持;
· 提供衍生出C++、JAVA、Restful API和ROS等多种SDK工具包;
· 提供了标准的性能测试和评估方法。
2、 部署

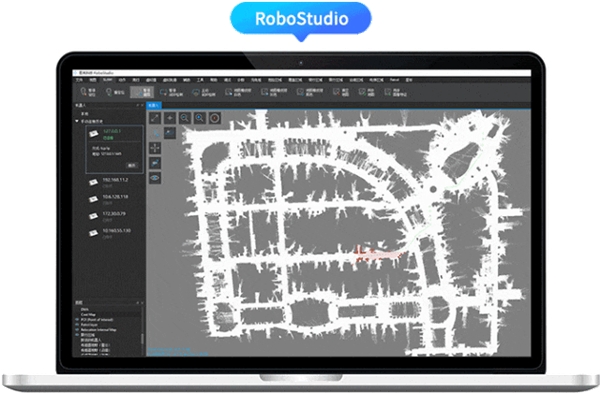
RoboStudio实时监控机器人运行状态
基于RoboStudio工具可让客户实时监控机器人的运行状态,节省部署时间。配合云端部署服务,历史数据可追溯和编辑。
3、 运维

在运维方面,配套了基于云端的运维服务,可以远程连接机器进行异常恢复。响应客户现场问题,协助客户完成场景的应用和运维。
三、 支持多场景SLAM算法调优 , 易扩展,易接入客户应用
SLAMKit针对家用、清洁、工业、配送和巡检等多种类型场景下的SLAM问题进行了适配和调优,通过差异化的参数配置保证机器人在面对各类复杂场景运行时的稳定性。
同时,SLAMKit可适配常用的intel和ARM处理器平台,高度优化的代码结构有效地降低了硬件计算资源消耗,易扩展和接入客户的应用。
四、 完整的工具链支撑,高效开发
SLAMKit提供C++、Java SDK、ROS、Restful API 等SDK工具包,助力客户快速进行二次开发。提供了具备离线建图、多地图拼接、多层地图融合、地图元素编辑等丰富功能的工具集合,为客户的场景部署降本增效。
多地图拼接

完整的开发包
五、 出众的性能,胜任场景
目前,SLAMKit已经通过软件授权的方式接入到客户的应用中去,通过系统适配或虚拟化技术与客户端软件打通,为客户机器提供自主定位建图能力,在商用清洁、巡检、智慧配送等领域开展应用,以较低的资源占用,优异的性能,实现性价双优。
所以如果你在烦恼SLAM做不好,不妨一试啊!